A Continuous Occlusion Model for Road Scene Understanding
 Publication Date: June 27, 2016
Publication Date: June 27, 2016
Event: 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR)
Reference: 10.1109/CVPR.2016.469
Authors: Vikas Dhiman, University of Michigan, Ann Arbor, MI, USA; Quoc-Huy Tran, NEC Laboratories America, Inc., Cupertino, CA, USA, Jason J. Corso, University of Michigan, Ann Arbor, MI, USA; Manmohan Chandraker, NEC Laboratories America, Inc., Cupertino, CA, USA
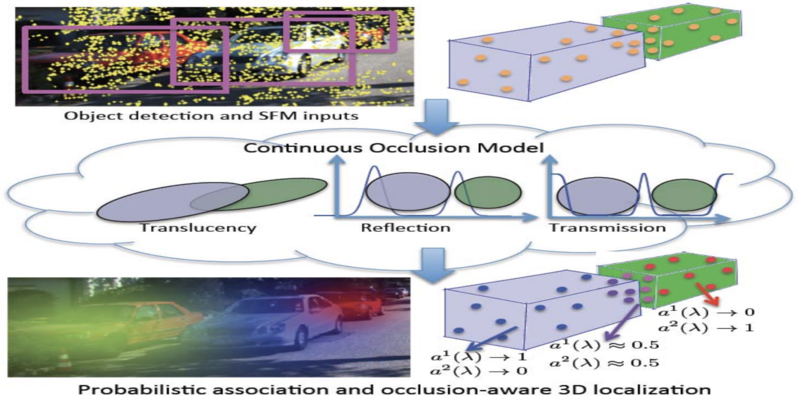
Abstract: We present a physically interpretable 3D model for handling occlusions with applications to road scene understanding. Given object detection and SFM point tracks, our unified model probabilistically assigns point tracks to objects and reasons about object detection scores and bounding boxes. It uniformly handles static and dynamic objects, thus outperforming motion segmentation for association problems. It also demonstrates occlusion-aware 3D localization in road scenes.
Publication Link: https://openaccess.thecvf.com/content_cvpr_2016/papers/Dhiman_A_Continuous_Occlusion_CVPR_2016_paper.pdf